


This project allows the user to teleoperate a remote robot using haptic devices with force feedback in virtual reality environments and augmented reality. The operator feels in the field and in this way, transfer the experience of the operator to the field of tests to protect their physical integrity. The augmented reality uses a 360 degrees’ cam wireless streaming to represent the environment in the user HMD.
The project uses an Oculus Rift DK2 for Virtual and Augmented Reality, Novint Falcon to force feedback, Ricoh Theta S to 360 photos/videos and LeapMotion to use the user interface with their hands.

The user in the local side, teleoperating the robot using feedback force device inside a virtual reality environment.
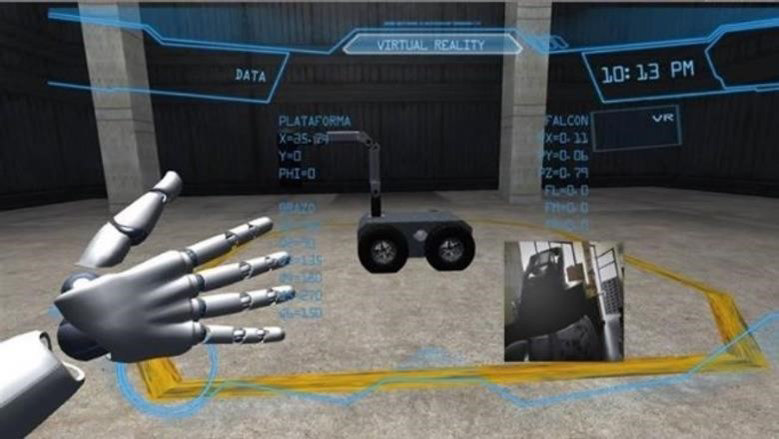
The user interface in a Virtual Reality mode

The user interface in the augmented reality mode
